Geometrisk: Dette er netop ligningen for en plan gennem $\,(0,0,0)\,$ med $\,\mv\,$ som normalvektor. Find Løsningen på standardparameterform, så har du de to basisvektorer der udspænder komplementet.
answer
En basis er $\,(\,(-2,1,0),(-3,0,1)\,)\,.$
C
Find i $\,\reel^3\,$ en basis for det ortogonale komplement til underrummet udspændt af $\,(1,1,0)\,$ og $\,(0,2,1)\,.$
answer
En basis er krydsproduktet $\,(1,-1,2)\,.$
D
Find i $\,\reel^4\,$ en basis for det ortogonale komplement til underrummet udspændt af $\,(1,-1,2,5)\,$ og $\,(0,1,0,-2)\,.$
hint
Der opstår et homogent ligningssystem af to lineære ligninger med fire ubekendt. Find Løsningen på standardparameterform, så har du to basisvektorer der udspænder komplementet.
answer
En basis er $\,(\,(-2,0,1,0),(-3,2,0,1)\,)\,.$
Opg 2: Når der er $\,n\,$ forskellige egenværdier
A
Hvorfor er det særligt nemt at diagonalisere en symmetrisk $\,n\times n\,$-matrix ved ortogonal substitution, hvis den har $\,n\,$forskellige egenværdier?
answer
Tag en egentlig egenvektor tilhørende hver af egenværdierne, så er det samlede sæt af egenvektorer allerede en ortogonal basis for $\,\reel^n\,.$ Hvis man normerer vektorerne (så de alle får længden 1), har vi en ortonormal basis for $\,\reel^n\,.$ Den matrix der fremkommer når basisvektorerne sættes sammen, kan diagonalisere den givne symmetriske matrix (ved ortogonal substitution).
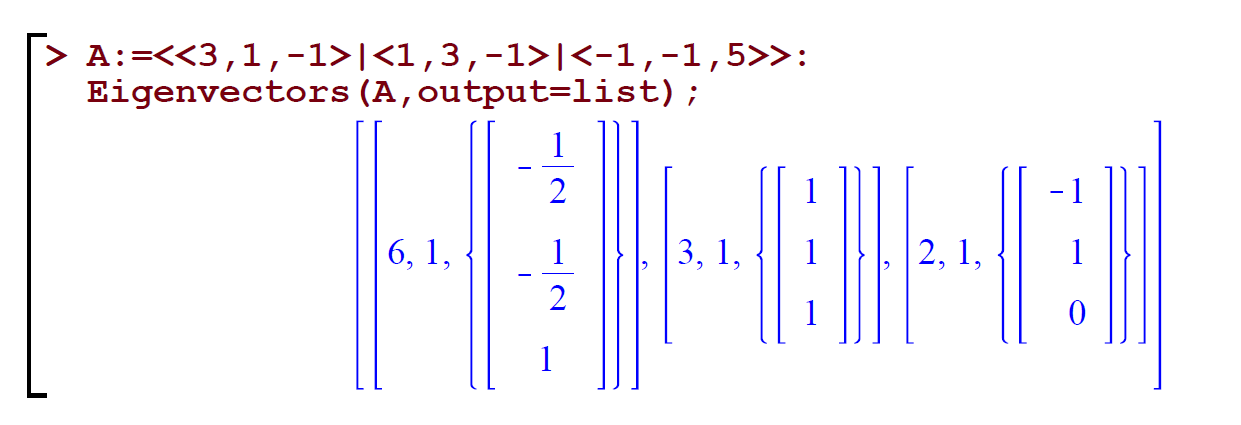
En $\,3\times 3$-matrix $\,\mA\,$ har været behandlet i Maple/SymPy således:
Opskriv $\,\mA\,$ og gør rede for at den er symmetrisk.
C
Lad $\,f\,$ betegne den lineære afbildning som har afbildningsmatricen $\,\mA\,$ med hensyn til den sædvanlige basis i $\,\reel^3\,.$ Bestem en ortonormal basis for $\,\reel^3\,$ bestående af egenvektorer for $\,f\,,$ og angiv den afbildningsmatrix som $\,f\,$ repræsenteres ved med hensyn til den fundne ortonormale basis.
hint
Du normerer en vektor ved at dividere vektoren med dens længde. Betragt fx $\,(1,1,1)\,.$ Dens længde er $\,\sqrt{1^2+1^2+1^2}=\sqrt{3}\,.$ Normeret er vektoren derfor $\,(\frac{1}{\sqrt{3}},\frac{1}{\sqrt{3}},\frac{1}{\sqrt{3}})\,.$
Sæt basisvektorerne fra forrige facit op som søjler en $\,3\times 3$-matrix, så har du $\,Q\,.$ Den tilhørende diagonalmatrix $\,\mathbf{\Lambda}\,$ er den som blev opstillet i forrige facit.
Opg 3: Egenrum med gm > 1
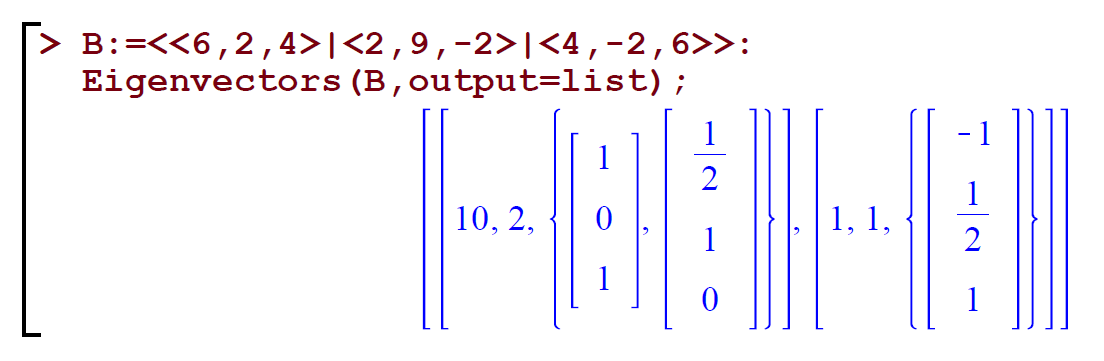
En $\,3\times 3$-matrix $\,\mB\,$ har været behandlet i Maple/SymPy således:
Opskriv $\,\mB\,$ og gør rede for at den er symmetrisk.
B
Bestem en ortogonal matrix $\,Q\,$ og en diagonalmatrix $\,\mathbf{\Lambda}\,$ således at
%$\,\mathbf Q\transp\cdot\mB\cdot\mathbf Q=\mathbf{\Lambda}\,.$
Maple stiller et sæt af tre lineært uafhængige egenvektorer til rådighed. Men de to der hører til $\,E_{10}\,,$ er tydeligvist ikke ortogonale (deres prikprodukt er ikke 0). Flere fremgangsmåder er mulige:
1) Standardmetoden er at bruge GramSchmidt til at finde en ortonormal basis $\,(\,\mathbf q_1,\mathbf q_2)\,$ for $\,E_{10}\,$ og vælge en enhedsvektor $\,\mathbf q_3\,$ i $\,E_{1}\,,$ det ortogonale komplement til $\,E_{10}\,.$ Så er $\,(\,\mathbf q_1,\mathbf q_2,\mathbf q_3)\,$ en ortonormal basis for $\,\reel^3\,$ bestående af egenvektorer for $\,\mB\,.$
2) Det er muligt i denne opgave helt at undgå GramSchmidt: Vælg $\,\mathbf q_1 \in E_{10}\,$ og $\,\mathbf q_2 \in E_{1}\,.$ Argumentér for at $\,\mathbf q_3=\mathbf q_1\times \mathbf q_2\,$ ligger i $\,E_{10}\,$ og at $\,(\,\mathbf q_1,\mathbf q_2,\mathbf q_3)\,$ derfor er en ortonormal basis for $\,\reel^3\,$ bestående af egenvektorer for $\,\mB\,.$
Der findes præcis otte mulige ortonormale baser for $\,\reel^2\,$ bestående af egenvektorer for $\,f\,.$ Lav en tegning hvor basisvektorerne afsættes ud fra origo i planen.
Men første basisvektor behøver jo ikke ligge i 1. kvadrant…
B
Fire af de otte baser har sædvanlig orientering. Vis at den ortogonale matrix der hører til hver af de fire er positiv ortogonal, mens de andre fire er negativt ortogonale.
answer
En af de fire baser som har sædvanlig orientering, er den som er angivet i forrige facit. Determinanten af dens tilhørende ortogonale matrix er 1. Derfor er den positiv ortogonal.
Opg 5: Positiv ortogonal matrix som afbildningsmatrix
Enhver positiv ortogonal matrix i $\,\reel^{2\times 2}\,$ kan skrives på formen
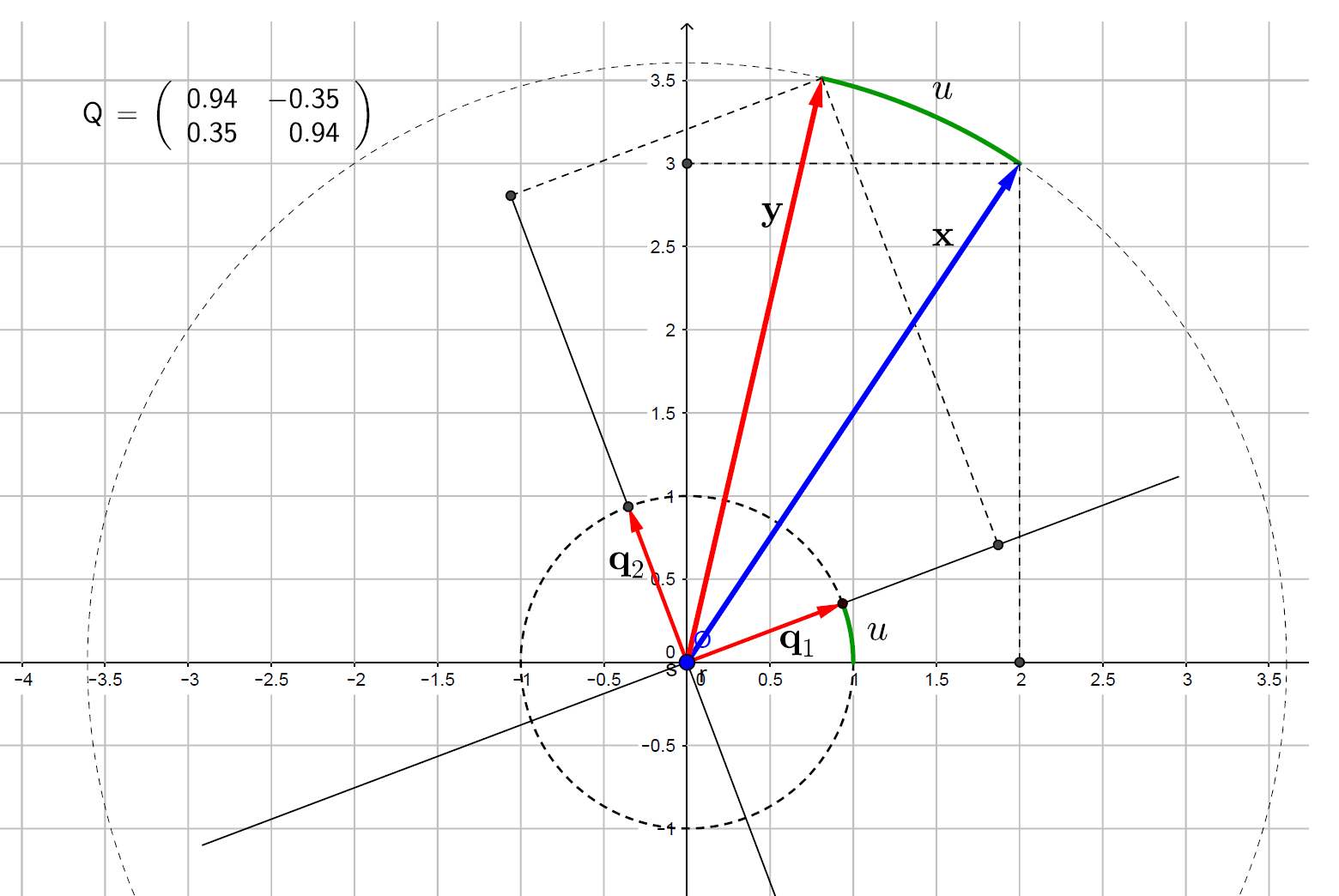
Bemærk at $\,u\,$ er retningsvinklen for den første basisvektor $\,(\cos(u),\sin(u))\,.$ Eller rettere: q-koordinatsystemet fremkommer ved en drejning af standard-koordinatsystemet med vinken $\,u\,.$ Vi skal nu undersøge hvordan $\,\mQ\,$ virker som afbildningsmatrix!
A
Gør rede for at billedet $\,\my=\mathbf Q\cdot\mx\,$ fremkommer ved at vektoren $\,\mx\,$ drejes med vinken $\,u\,,$ se figuren
hint
Det gælder om at vise at koordinatvektoren for $\,\my\,$ med hensyn til den nye basis er identisk med koordinatvektoren for $\,\mx\,$ i standardbasen.
$$\vekind qy=\matind qMe\cdot\vekind ey
=\matind qMe\cdot(\matind eMq\cdot\vekind ex)
=(\matind qMe\cdot\matind eMq)\cdot\vekind ex
=\vekind ex\,.$$
QED.
B
Åbn GeoGebra-arket OrtogonalAfbildning . Verificér at mens $\,\mQ\,$ afbilder $\,\mx\,$ i $\,\my\,$ ved drejning med vinklen $\,u\,,$ så gør $\,\mQ\transp\,$ det modsatte: afbilder $\,\mx\,$ i $\,\mz\,$ ved drejning med vinklen $\,-u\,.$
Opg 6: Analyse af symmetrisk afbildning
Antag at en symmetrisk $\,2\times 2\,$ matrix $\,\mA\,$ er blevet diagonaliseret ved positiv ortogonal substition således:
I ligningen $\,\mathbf Q\transp\cdot\mA\cdot\mathbf Q=\mathbf{\Lambda}\,$ ganger du på begge sider med fra venstre med $\,\mQ\,$ fra venstre og $\,\mQ\transp\,$ fra højre.
B
I forlængelse heraf: Gør rede for at en symmetrisk afbildning derfor er sammensat således:
Først drejes objektet med vinklen -$u\,$ hvor $\,u\,$ betegner retningsvinklen for første søjle i $\,\mQ\,.$
Det drejede objekt skaleres med faktor $\,\lambda_1\,$ i førstaksens retning og med med faktor $\,\lambda_2\,$ i andenaksens retning.
Det skalerede objekt drejes (tilbage!) med vinklen $\,u\,.$
som en afbildningsmatrix for geometriske vektorer i planen afsat ud fra origo. Find en drejningsvinkel $\,u\,$ som indgår i afbildningens step 1 og 3. Og bestem de faktorer der i step 2 skal skaleres med i henholdsvis førsteaksens retning og andenaksens retning.
Vi skal nu faktorisere og analysere afbildningsmatricen