Lad $\,f:\reel^3\rightarrow\reel^3\,$ være den afbildning, der med hensyn til standardbasen for $\,\reel^3\,$ har afbildningsmatricen
\begin{equation}
\mA=\begin{matr}{rrr} 3 & 4 & 4 \newline 6 & 6 & 6 \newline -6 & -7 & -7 \end{matr}.
\end{equation}
A
Hvordan kan man nemmest tjekke at vektorerne $\,\mv_1=(1,0,-1)\,$, $\,\mv_2=(0,1,-1)\,$ og $\,\mv_3=(1,2,-2)\,$ er egenvektorer for $\,f\,?$ Gør det, og angiv de tilhørende egenværdier!
hint
Da der allerede er foreslået nogle egenvektorer, behøver vi ikke her gå den lange vej med det karakteriskte polynomium osv.
hint
Udregn $\,\mA\cdot\mv_1\,.$ Måske facit minder lidt om $\,\mv_1\,$….
answer
$\mA\cdot\mv_1=\begin{matr}{rrr} -1 \newline 0 \newline 1 \end{matr}=-1\cdot\mv_1\,$, så $\,\lambda_1=-1\,$.
$\mA\cdot\mv_2=\begin{matr}{rrr} 0 \newline 0 \newline 0 \end{matr}=0\cdot\mv_2\,$, så $\,\lambda_2=0\,$.
$\mA\cdot\mv_3=\begin{matr}{rrr} 3 \newline 6 \newline -6 \end{matr}=3\cdot\mv_3\,$, så $\,\lambda_3=3\,$.
B
Hvordan kan vi nemmest argumentere for at $\mv_1,\,\mv_2$ og $\mv_3$ er lineært uafhængige.
hint
Anvend med fordel Sætning 13.11, punkt 1, i eNote 13.
C
Hvordan kan vi nemmest vise, at $\,f(\reel^3)=\spanVec \lbrace \mv_1,\mv_3 \rbrace \,?$
hint
Udnyt at $(\mv_1,\mv_2,\mv_3)$ er en basis for $\reel^3$ bestående af egenvektorer for $f\,,$ en egenbasis. Billedrummet $f(\reel^3)$ er (som altid) udspændt af basisvektorerne billeder.
hint
$f(\mv_1)$, $f(\mv_2)$ og $f(\mv_3)$ har vi jo lige udregnet.
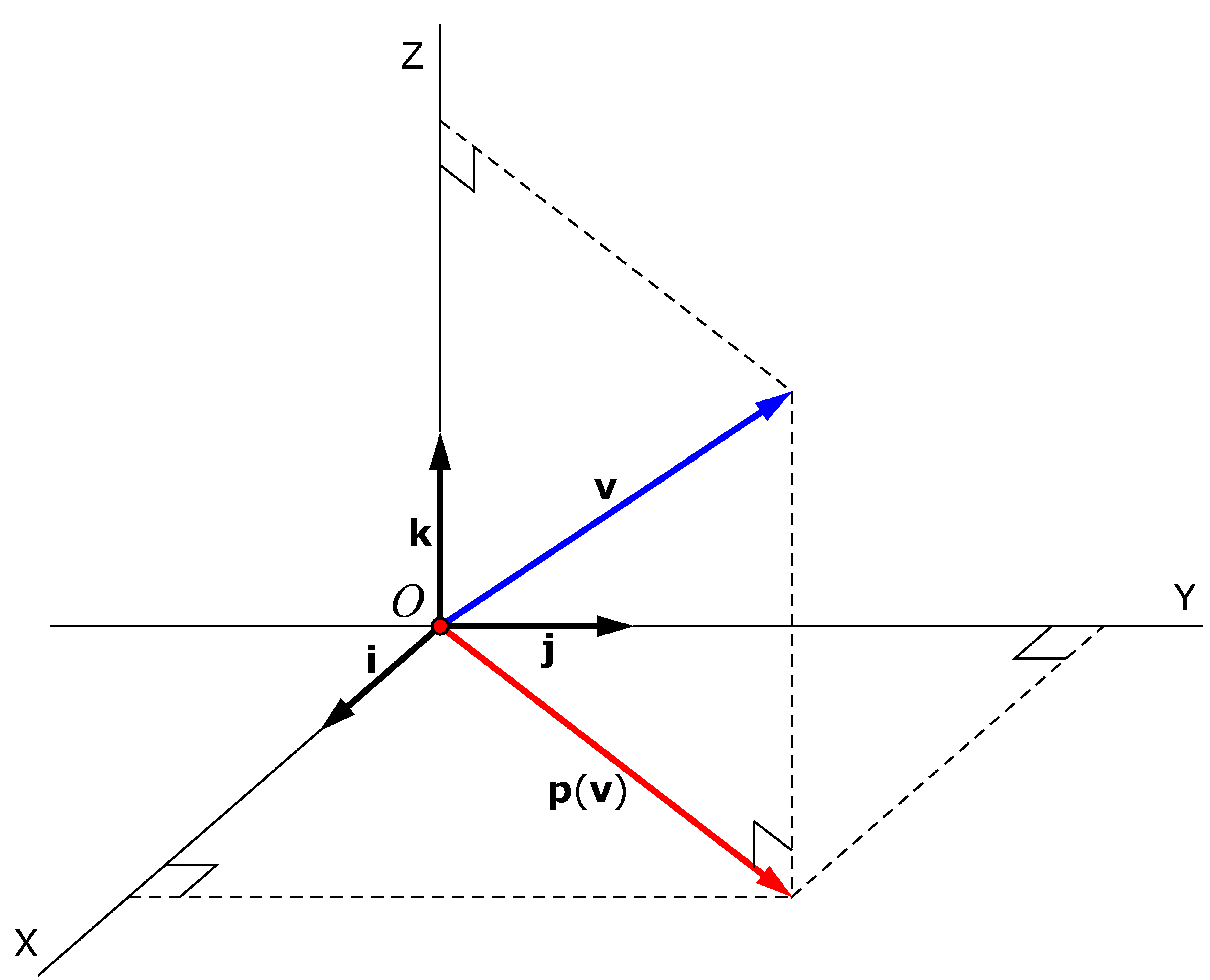
I rummet er der givet et standard $\,(O,\mathbf i,\mathbf j,\mathbf k)$-koordinatsystem. Alle vektorer tænkes afsat ud fra Origo. Afbildningen $\,p\,$ projicerer vektorer ned i $(X,Y)$-planen i rummet, se figuren. Det oplyses at $\,p\,$ er lineær (skal ikke vises).
Vi skal nu betragte egenværdiproblemet for projektion ned i $\,(x,y)\,$-planen.
A
Bestem samtlige egenværdier for $\,p\,$ og de egenrum der hører til egenværdierne, udelukkende ved hovedregning (grubling).
hint
Der er to egenværdier som I nu får oplyst. Den første er tallet 1. Det I skal tænke over, er derfor: Hvilke vektorer er fiksvektorer for $\,p\,,$ det vil sige bliver afbildet på sig selv? Den anden er tallet 0. Det I skal tænke over, er derfor: Hvilke vektorer bliver kun til et punkt ($\,\mnul$-vektoren).
answer
$\,E_1\,$ er samtlige vektorer i $\,(x,y)$-planen i rummet. De rør sig jo ikke ud af stedet ved projektion ned i $\,(x,y)$-planen. $\,E_0\,$ er samtlige vektorer på $\,z$-aksen, de ryger jo ned i Origo.
B
Vælg to forskellige egenbaser (det er baser bestående af egenvektorer for $\,p\,$) og bestem i hvert af de to valgte tilfælde den diagonalmatrix som bliver afbildningsmatrix for $\,p\,$ med hensyn til den valgte basis.
hint
Brug først standardbasen $\,(\mathbf i,\mathbf j,\mathbf k)\,$. Hvordan?
answer
Med brug af standardbasen opnås afbildningsmatricen:
Med brug fx af egenbasen $\,\big(\,(1,1,0),(1,-1,0),(0,0,-1)\,\big)\,$ opnås samme afbildningsmatrix. Find selv en egenbasis som ikke har samme afbildningsmatrix.
Bemærk at 0 er en af egenværdierne.
Diagonalisering er mulig, da der findes tre lineært uafhængige egenvektorer for $\,\mC\,.$
Flere rigtige svar er mulige, her er et af dem:
Angiv egenværdier og samtlige tilhørende egenvektorer for den lineære afbildning $\,f:\reel^3\rightarrow\reel^3\,$ der med hensyn til standardbasis $\,e\,$ i $\,\reel^3\,$ har afbildningsmatricen $\,\mA\,.$
answer
Det fremgår af Maple/SymPyudskriften, at $\,\mA\,$ har egenværdierne 4, -2 og 3, alle med algebraisk og geometrisk multiplicitet 1.
De tilhørende egenvektorrum fremgår også, idet $\,E_4=\spanVec{(-2,-2,1)}\,,$$\,E_3=\spanVec{(1,1,0)}\,$ og $\,E_{-2}=\spanVec{(-1,-2,4)}\,.$
C
Find en basis $\,v=(\mv_1,\mv_2,\mv_3)\, $ for $\,\reel^3\,$ bestående af egenvektorer for $\,f\,.$
hint
Kig igen på den vigtige Sætning 13.11 i eNote 13.
answer
$\mv_1=(-2,-2,1)\in E_4\,$, $\,\mv_2=(1,1,0)\in E_{3}\,$ og $\,\mv_3=(-1,-2,4)\in E_{-2}\,$ kan ifølge Sætning 13.11, punkt 1, i eNote 13 udgøre en basis for $\,\reel^3\,.$
D
Find afbildningsmatricen for $\,f\,$ med hensyn til basen $\,v\,$ fundet i foregående spørgsmål.
Vis at $\mA$ og $\mB$ er similære med den samme diagonalmatrix
answer
Hvis vi sætter $\,\mV=\begin{matr}{cc} -i&i\newline 1&1\end{matr}\,,$$\,\mU=\begin{matr}{cc} i&-i\newline 1&1\end{matr}\,$ og $\,\mathbf{\Lambda}=\begin{matr}{cc} i&0\newline 0&-i\end{matr}\,$ så gælder:
Advanced:
Vi opfatter nu $\,\mA\,$ som en afbildningsmatrix for for en lineær afbildning $\,f:\reel^2\rightarrow\reel^2\,$ med hensyn til standardbasen i $\,\reel^2\,.\,$ Bestem en ny basis $\,m\,$ for $\,\reel^2\,$ med hensyn til hvilken $\,f\,$ repræsenteres ved afbildningsmatricen $\,\mB\,.$
hint
Se de afsluttende eksempel i dagens Maple/SymPy-Demo
Find egenværdier og de tilhørende komplekse egenvektorrum for $\,\mA\,.$
answer
Egenværdierne er $1+i$, $1-i$ og 3. Alle med algebraisk multiplicitet 1.
De til $\lambda=1+i$ hørende egenvektorer $\mx=t_1\cdot\begin{matr}{rrr} 0 \newline i \newline 1 \end{matr}$, hvor $t_1\in\mathbb{C}$,
de til $\lambda=1-i$ hørende egenvektorer er $\mx=t_2\cdot\begin{matr}{rrr} 0 \newline -i \newline 1 \end{matr}$, hvor $t_2\in\mathbb{C}$ og
de til $\lambda=3$ hørende egenvektorer er $\mx=t_3\cdot\begin{matr}{rrr} 1 \newline -1 \newline 2 \end{matr}$, hvor $t_3\in\mathbb{C}$.
B
Diagonalisér $\,\mA\,$ ved similartransformation.
answer
Hvis vi sætter $\,\mV=\begin{matr}{ccc} 0&0&1\newline i&-i&-1\newline 1&1&2\end{matr}\,$ og $\,\mathbf{\Lambda}=\begin{matr}{ccc} 1+i&0&0\newline 0&1-i&0\newline 0&0&3\end{matr}\,$