Udregn det$(\mA)\,$ ved opløsning efter en selvvalgt række eller søjle.
hint
Du vælger selvfølgelig en række eller søjle med så mange 0’er som muligt.
answer
$12\,.$
B
Omform med nogle rækkeoperationer $\,\mA\,$ til en trekantmatrix, og udregn ved hjælp heraf det$(\mA)\,.$
hint
Se sætning 9.13 og sætning 9.16.
answer
$12\,.$
Opg 2: Determinanter og rang
A
Repetition: Givet polynomiet $\,P(x)=-x^6+x^5+x^4-x^3\,.$ Faktorisér $\,P(x)\,$ idet du først sætter$\,-x^3\,$uden for parentes og i parentesen har et tredjegradspolynomium. Find rødderne i dette, og angiv herefter samtlige rødder i $\,P(x)\,$ med deres algebraiske multipliciteter.
answer
$x \in \lbrace -1,0,1 \rbrace$.
Roden -1 har multiplicitet 1, roden 0 har multiplicitet 3 og roden 1 har multiplicitet 2. Summen af multipliciteterne er som forventet 6.
Givet matricen \begin{equation}
\mA = \begin{matr}{llll} 1 & a & a^2 & a^3 \newline 1 & 0 & a^2 & a^3 \newline 1 & a & a & a^3 \newline 1 & a & a^2 & a \end{matr}, \quad \mathrm{hvor} \quad a \in \reel.
\end{equation}
B
Bestem (gerne med Maple/SymPy) determinanten af $\mA\,.$
answer
det$\mA=-a^6+a^5+a^4-a^3\,.$
C
For hvilke værdier af $\,a\,$ er $\,\mA\,$ en singulær matrix?
answer
$a \in \lbrace -1,0,1 \rbrace$.
D
Find rangen af $\,\mA\,$ for $\,a \in \lbrace -4, -3, -2, -1, 0, 1, 2, 3, 4 \rbrace\,.$
Hvad har rangen med de fundne rødder i determinanten at gøre?
answer
For $\,a \in \lbrace -4,-3,-2,2,3,4 \rbrace,$ er rangen 4, dvs. $\,\mA\,$ har fuld rang. For $\,a \in \lbrace -1,0,1 \rbrace$ er rangen hhv. 3, 1 og 2.
E
Find rangen af $\mA$ for alle $ a \in \reel $.
answer
For $a \in \reel \setminus \lbrace -1,0,1 \rbrace$ er rangen 4, for
$a \in \lbrace -1,0,1 \rbrace$ er rangen hhv. 3, 1 og 2.
F
Find for alle $ a \in \reel $ løsningsmængden for det lineære homogene ligningssystem som har $\mA$ som koefficientmatrix.
Opg 3: Drilleopgave hvor enhedsmatricen dukker op
De følgende spørgsmål løses ved håndregning og smart tænkning!
Gør ved hjælp af determinanter rede for at $\,\mA\,$ og $\,\mB\,$ er regulære og dermed invertible. Kan det heraf konkluderes at $\,\mA\mB\,$ er regulær og invertibel?
hint
Kan vi nemt få det$(\mA\mB)\,,$ og hvad kan vi bruge den til?
B
Udregn $\,\mA\mC\,,$$\,\mB\mD \,$ og og $ \mD\mC $.
Udregn $\det(\mA) $ og $\det(\mB) $ med Maple/SymPy.
answer
$\det(\mA)=2$ og $\det(\mB)=31$.
B
Udregn $\det(\mA^7)$ og $\det(\mA^{\transp}\mB)$ uden brug af Maple/SymPy.
answer
$\det(\mA^7)=(\det(\mA))^7=2^7=128$ og $\det(\mA\transp\mB)=\det(\mA)\cdot\det(\mB)=2\cdot31=62$.
C
Vis, at $\mA$ har en invers, og angiv $\det(\mA^{-1})$ og $\det(\mA^{-7})$.
hint
Der var vist en smart regneregel om $\det(\mA^{-n})$ i sætning 9.20 i eNote 9.
answer
Der findes en invers, idet $\det(\mA)\neq 0$, så $\mA$ er regulær.
$\det(\mA^{-1})=(\det\mA)^{-1}=\frac{1}{\det\mA}=\frac{1}{2}$ og $\det(\mA^{-7})=\frac{1}{(\det\mA)^{7}}=\frac{1}{128}$.
Opg 5: Vektorers addition og multiplikation med skalar
A
Tegn to vektorer $\,\mathbf a\,$ og $\,\mathbf b\,$ på et stykke papir. Konstruér vektorerne $\,\mathbf a+\mathbf b\,$ og $\,\mathbf a-\mathbf b\,.$
B
Herefter afprøves produkt af vektor og skalar. Tegn en vektor $\,\mathbf c\,$ på et stykke papir. Hvordan ser vektorerne $\,\frac 12 \mathbf c\,$ og $-3\mathbf c\,$ ud?
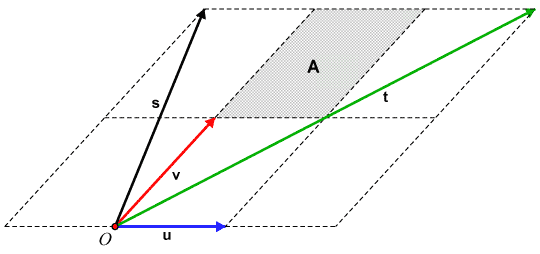
Udtryk både $\mathbf s$ og $\mathbf t$ som en linearkombination af $\mathbf u$ og $\mathbf v$, og indsæt de to linearkombinationer i stedet for $\mathbf s$ og $\mathbf t$ i højresiden af ligningen.
C
Bestem fire hele tal $a,\,b,\,c\,\,\mathrm{og}\,\,d$ således at $A$ kan beskrives ved parameterfremstillingen
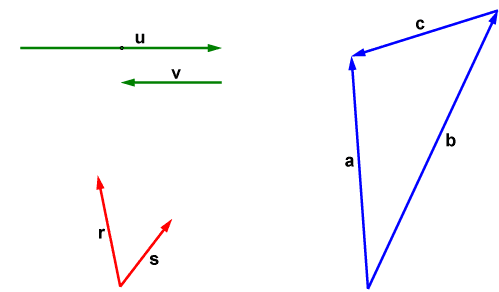
I denne opgave indgår der tre forskellige scenarier i planen, se figuren.
A
Afgør for hvert af vektorsættene $(\mathbf u,\mathbf v)$, $(\mathbf r,\mathbf s)$ og $(\mathbf a,\mathbf b,\mathbf c)$ om de er lineært uafhængige. I modsat fald ønskes nul-vektoren opskrevet som en egentlig linearkombination af vektorerne i sættet.
hint
Se definition 10.20 i eNote 10.
hint
Se sægning 10.24 i eNote 10.
answer
$\mathbf r$ og $\mathbf s$ er ikke parallelle, de er derfor lineært uafhængige.
$\mathbf u$ og $\mathbf v$ er lineært afhængige da $\mathbf u=-2 \mathbf v\,$. Heraf: $\mathbf u+2\mathbf v=\mnul\,$.
$\mathbf a$, $\mathbf b$ og $\mathbf b$ er lineært afhængige da
$\mathbf a=\mathbf b+\mathbf c\,$. Heraf:
$\mathbf a-\mathbf b-\mathbf c=\mnul\,$.
Opg 8: Basisskifte og koordinater i planen
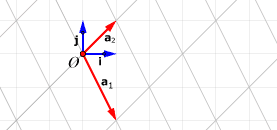
I denne opgave ser vi på hvordan en given vektors koordinater ændres, når der skiftes basis.
På figuren er der i planen givet en sædvanlig basis $e=(\mathbf i, \mathbf j)$ samt en basis $a=(\mathbf a_1, \mathbf a_2)$.
A
En vektor $\mathbf u$ har koordinaterne $(5,-1)$ med hensyn til basis e. Bestem $\mathbf u$’s koordinater med hensyn til basis a.
En vektor $\mathbf v$ har koordinaterne $(-1,-2)$ med hensyn til basis a. Bestem $\mathbf v$’s koordinater med hensyn til basis e.
answer
$_\mathrm a\mathbf u=
\begin{matr}{r}2\newline 3\end{matr}$ og $ _\mathrm e \mathbf v=
\begin{matr}{r}-3\newline 0\end{matr}.$
Opg 9: Basisskifte og koordinater i rummet
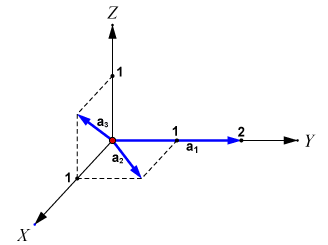
I denne opgave arbejder vi både med et sædvanligt koordinatsystem og med den basis $a$ som er vist på figuren.
A
Bestem determinanten af matricen $\,\left[\,\ma_1\,\,\ma_2\,\,\ma_3\,\right]\,.$ Gør rede for at sættet $\,(\ma_1,\ma_2,\ma_3)\,$ faktisk udgør en basis.
hint
Aflæs koordinaterne for de tre vektorer med hensyn til den sædvanlige basis.
answer
Da der er tre vektorer, og de er lineært uafhængige, er de en basis for mængden af vektorer i rummet.
B
Tre rumvektorer $\mathbf u,\,\mv$ og $\mathbf w$ kendes fra deres koordinater med hensyn til basis a således: